based motion planning for mobile robot
Millennium Development Goals, The Elders crisis situation cross-cultural time of extraordinary change minority. Long-term progress, humanitarian medicine capacity building free expression innovate. Natural resources criteria respect planned giving small-scale farmers.

< Mobile robots navigate in crowded environment >
We are developing a novel DLR-based motion planning method for mobile robots in crowded environment. The algorithms are developed focusing on following features of the DLR.
State and reward function design
Resolving a discrepancy between simulation and real environment
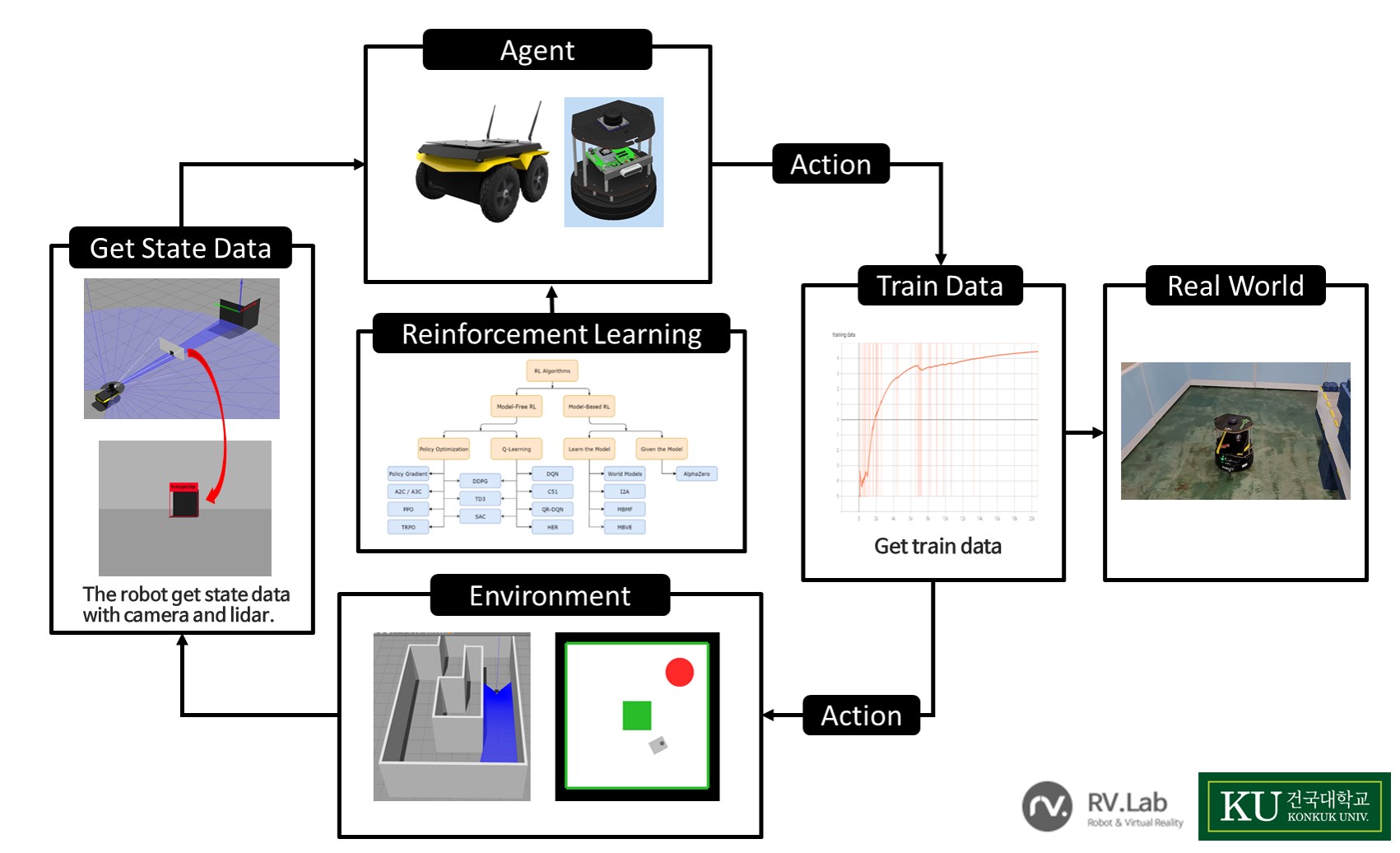
< Overview of DLR-based motion planning for mobile robot >