based motion planning for mobile robot
Precise localization is one of key technologies of autonomous navigation of outdoor mobile robots. Simultaneous localization and mapping (SLAM) has been widely used in the localization of the mobile robot, but it has several limitations, such as cost and computational load, to be used in outdoor applications. In this research, we are developing a highly precise localization method using GPS, UWB and IMU sensors.

< Outdoor delivery robots >
We are developing a precise localization algorithm for autonomous navigation of outdoor mobile robots. The algorithm utilizes three sensors, i.e. IMU(Inertial Measurement Unit), UWB(Ultra-wideband), and GPS sensors, and proposes optimal solution for localization by fuzzing the data of those sensors.
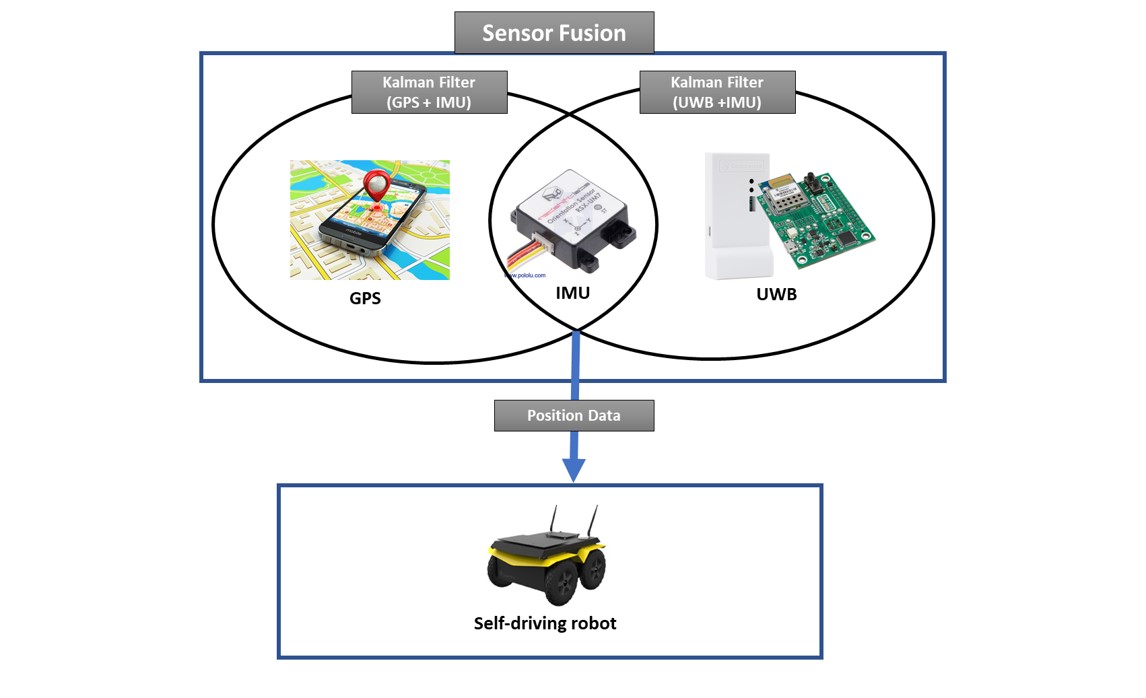
< Sensor fusion for outdoor localization >